“The Elements of Statistical Learning” 교재 3장의 Shrinkage Methods중 Forward Stagewise Selection, Least Angle Regression(LAR)에 관해 정리를 해보았다.
Forward Stagewise Selection
Foward Stepwise Selection을 다룬 이전 포스팅에서는 매 iteration마다 잔차 $\mathbf{r}$을 업데이트하면서 $\mathbf{x}_j^T\mathbf{r}$가 가장 큰 $j$를 찾아서(잔차와 상관관계가 가장 높은 변수) QR분해를 이용하여 해당변수를 추가해줬었다. Forward stagewise selection은 이와 비슷하지만 변수를 한번에 추가해주는것이 아닌 점진적으로 추가하는 방법이다. 알고리즘은 아래와 같다.
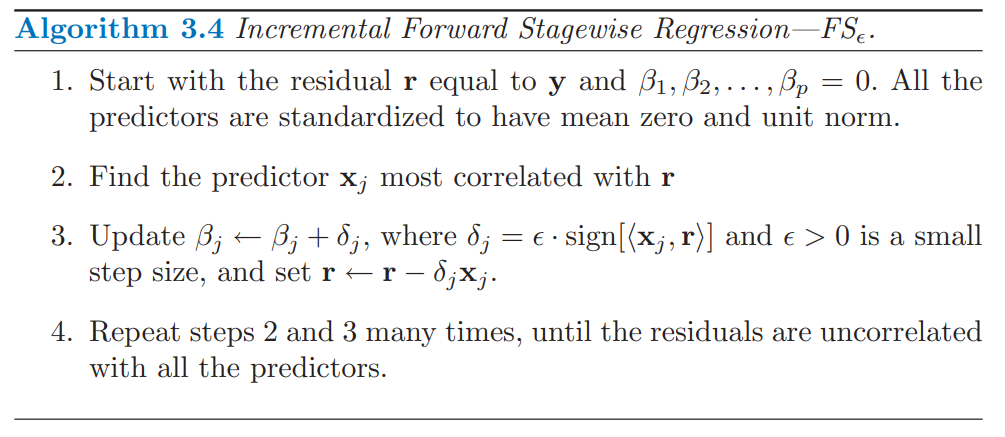
Note. 3번 과정에서 $\epsilon$ 에 $\left\langle \mathbf{x}_j, \mathbf{r} \right\rangle$을 대입하면 Forward stepwise selection이다.
Least Angle Regression
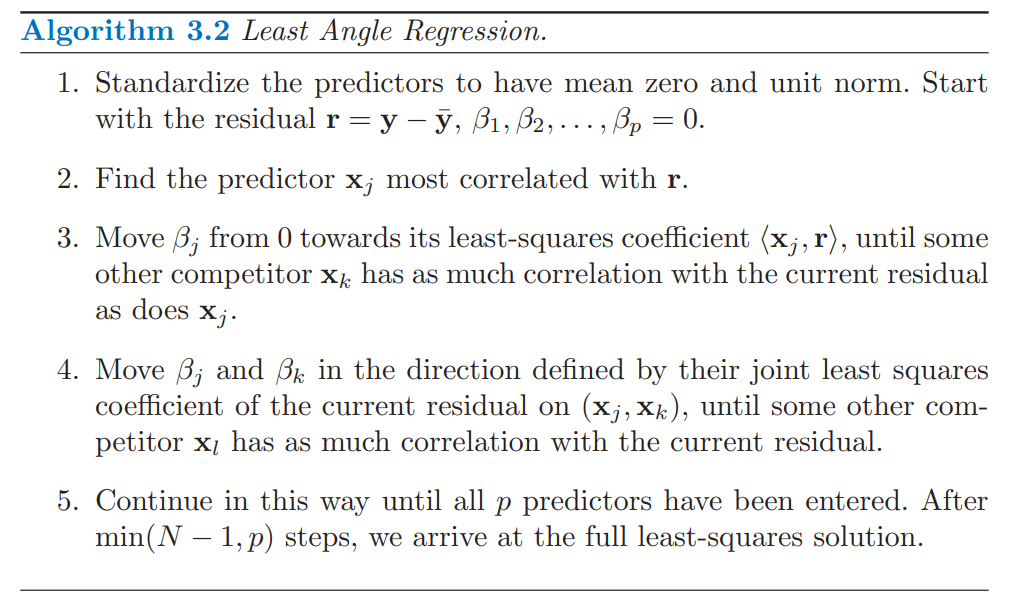
Least Angle Regression(LARS)은 Forward Stagewise selection을 굉장히 효율적?으로 개선된 모델이다. LARS의 해를 찾는데는 p번의 iteration만으로 충분하다. 만약 $p > N-1$일 경우 $N-1$번 이후로는 잔차가 0이 됨으로 업데이트가 이루어지지 않으므로 중단한다.(1을 뺀 이유는 데이터를 표준화했기 때문)
LARS의 간단하게 예시를 들자면 다음과 같이 작동한다. 먼저, 이전 Forward stagewise selection과 같이 모든 회귀 계수를 0으로 초기화하고 잔차와 가장 상관관계가 높은 $\mathbf{x}_1$를 찾는다. 이후에는 다른 잔차와 상관관계가 높은 $\mathbf{x}_2$가 나오기 전까지 가능한 한 크게 $\mathbf{x}_1$방향으로 움직인다. 여기까지는 Forward stagewise selection와 같다. 이후 업데이트 부터가 차이가 있는데, 다음 업데이트에서 $\mathbf{x}_2$의 방향으로 업데이트를 하는것이 아닌, $\mathbf{x}_1$,$\mathbf{x}_2$ 두 벡터와 같은 각을 이루는 새로운 벡터 $\mathbf{u}_2$의 방향으로 업데이트를 진행한다.
p=2인 경우의 LARS는 다음과 같이 진행된다. $\hat{\mathbf{\mu}}_0 = \mathbf{X}\beta = 0$를 잡는다. ($\mathbf{X} = (\mathbf{x}_1, \mathbf{x_2}), \ \beta_1=\beta_2=0$) 아래 그림과 같이 $\mathbf{y}$를 $\mathbf{X}$의 열공간에 정사영시킨 벡터를 $\bar{\mathbf{y}}_2$라 하면, 잔차 $\mathbf{c}(\hat{\mathbf{\mu}})$는 다음과 같이 구할 수 있다.
\[\mathbf{c}(\hat{\mathbf{\mu}}) = \mathbf{X}^T(\mathbf{y} - \hat{\mathbf{\mu}}) = \mathbf{X}^T(\bar{\mathbf{y}}_2 - \hat{\mathbf{\mu}})\]아래 그림에서 $\bar{\mathbf{y}}_2 - \hat{\mathbf{\mu}}$와 더 작은 각을 이루는(상관관계가 더 높은) 벡터는 $\mathbf{x}_1$이므로 (다시 말해서, $\mathbf{c}_1(\hat{\mathbf{\mu}}_0) > \mathbf{c}_2(\hat{\mathbf{\mu}}_0)$), $\mathbf{x}_1$방향으로 업데이트를 진행한다. 즉, $\hat{\mathbf{\mu}}_1 = \hat{\mathbf{\mu}}_0 + \hat{\gamma}_1 \mathbf{x}_1$이다. FS의 경우에서는 $\hat{\gamma}_1$에 $\epsilon$값을 사용하였지만, LARS는 $\bar{\mathbf{y}}_2 - \hat{\mathbf{\mu}}_1$이 $\mathbf{x}_1, \ \mathbf{x}_2$와 같은 각을 이루도록 $\hat{\gamma}_1$을 잡는다 (다시 말해서, $\hat{\gamma}_1$를 통해서 업데이트 된 예측값의 잔차를 해당 열공간에 정사영시킨 벡터와 등각을 이루도록 잡는다. 따라서 잔차와의 상관관계가 모두 같아진다.). 즉, $c_1(\hat{\mathbf{\mu}}_1) = c_2(\hat{\mathbf{\mu}}_1)$인 $\hat{\gamma}_1$를 찾는다.
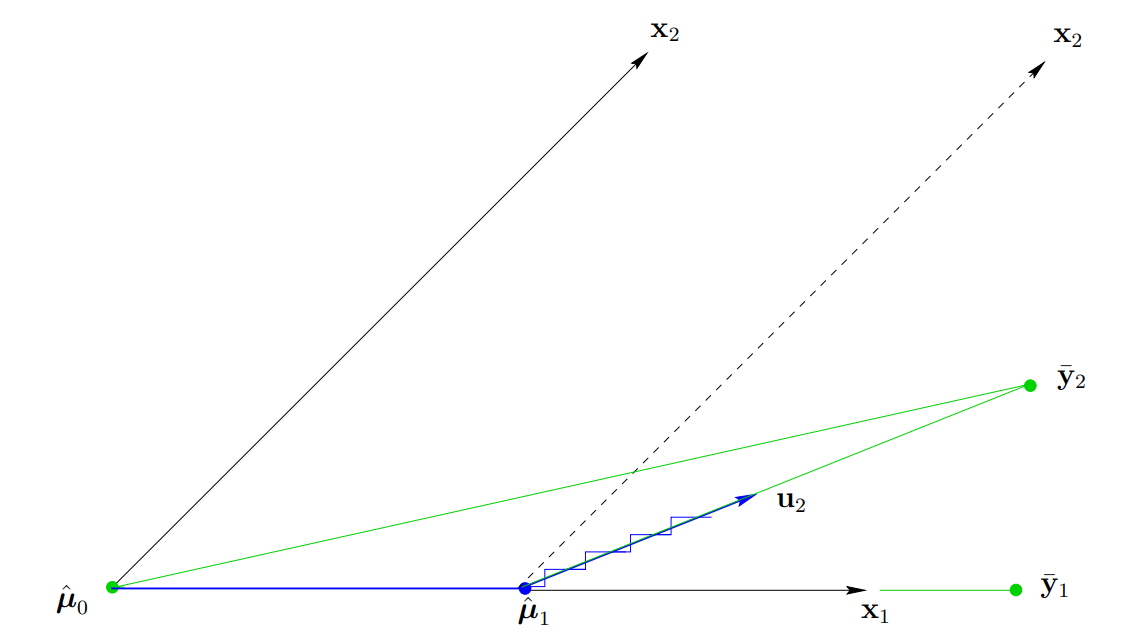
위 그림과 같이 $\mathbf{u}_2$를 $\mathbf{x}_1, \ \mathbf{x}_2$와 같은 각을 이루는 단위벡터라고 하자. LARS의 다음 스텝은 $\hat{\mathbf{\mu}}_2 = \hat{\mathbf{\mu}}_1 + \hat{\gamma}_2 \mathbf{u}_2$로, $\hat{\mathbf{\mu}}_2 = \bar{\mathbf{y}}_2$이 되도록 $\hat{\gamma}_2$을 잡는다. 만약 $p$가 2보다 클 경우에는 다음 $\mathbf{x}_3$와 같은 각을 이루도록, $\hat{\gamma}_2$를 더 작게 잡아 방향을 바꾼다. ($\hat{\mathbf{\mu}}_2 = \bar{\mathbf{y}}_2$이 되도록 잡은 $\hat{\gamma}_2$에 대한 잔차는 현재 컬럼벡터들과 수직으로 내적값이 0이다. 즉, $p>2$인 경우 다른 컬럼이 존재하여 이와의 내적값이 0보다 클 것이기에 이전에 방향이 바뀌게 된다.)
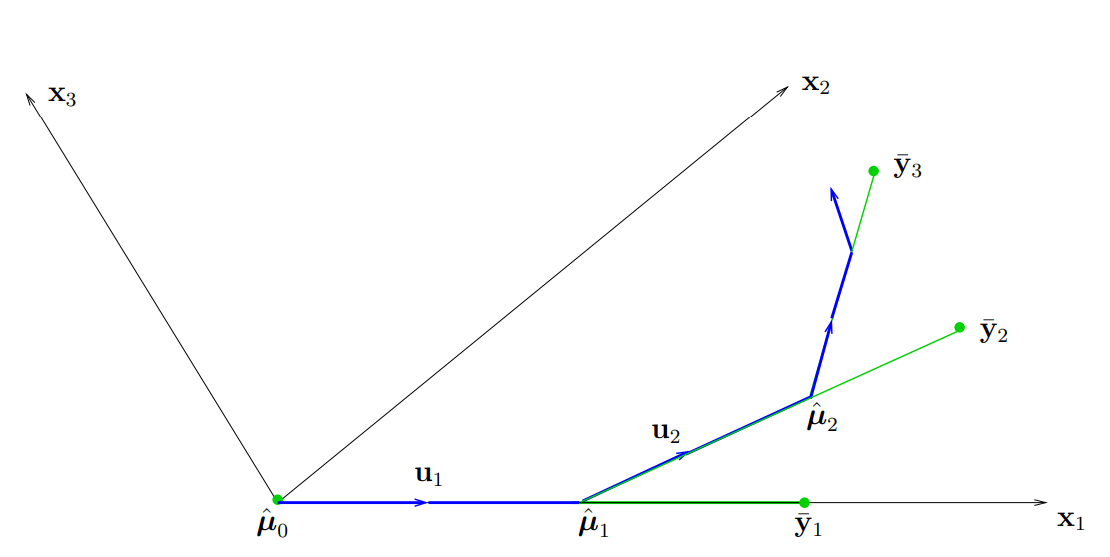
(위 그림을 보면, $k$번째 스탭에서 LARS의 estimator \(\hat{\mu}_k\)는 이전 스텝의 estimator인 \(\hat{\mu}_{k-1}\)과 현재 OLS estimator인 \(\bar{\mathbf{y}}_k\)의 직선상에 놓여있음을 확인할 수 있다. 이에 대해서는 밑에서 다시 다룰 예정이다.)
LARS의 작동과정은 알아봤으니 이제 $\hat{\gamma}_1,\hat{\gamma}_2,… $들을 구하는 방법을 알아보자. 먼저 $\mathbf{X}$의 열벡터는 모두 선형독립이라고 가정하자. $\mathcal{A}$를 현재 선택된 변수들의 인덱스를 모아놓은 집합이라고 하고, 다음과 같이 정의해보자.
\[\begin{align*} \mathbf{X}_{\mathcal{A}} &= (..., s_j\mathbf{x}_j,...)_{j\in \mathcal{A}}, \ s_j = sign(\left\langle \mathbf{x}_j, \mathbf{y}-\hat{\mathbf{\mu}}_{\mathcal{A}} \right\rangle) \\ \mathbf{\mathcal{G}}_{\mathcal{A}} &= \mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}} \\ \mathbf{A}_{\mathcal{A}} &= (1_{\mathcal{A}}^T \mathbf{\mathcal{G}}^{-1} 1_{\mathcal{A}})^{-\frac{1}{2}} \in \mathbb{R} \ \text{where} \ \ 1_{\mathcal{A}} \in \mathbb{R}^{|\mathcal{A}|} \text{is a vector of 1's} \end{align*}\]이렇게 정의하고 나면, $\mathbf{X}_{\mathcal{A}}$내의 열벡터들과 같은 각을 이루는 벡터 $\mathbf{u}$를 다음과 같이 잡을 수 있다.
\[\mathbf{u}_{\mathcal{A}} = \mathbf{X}_{\mathcal{A}} w_{\mathcal{A}}, \ \text{ where} \ w_{\mathcal{A}} = \mathbf{A}_{\mathcal{A}}\mathbf{\mathcal{G}}_{\mathcal{A}}^{-1}1_{\mathcal{A}}\]다음 내적을 통해 $\mathbf{u}_{\mathcal{A}}$가 같은 각을 이루는지 확인할 수 있다.
\[\mathbf{X}_{\mathcal{A}}^T\mathbf{u}_{\mathcal{A}} = \mathbf{X}_{\mathcal{A}}^T(\mathbf{X}_{\mathcal{A}}w_{\mathcal{A}}) = \mathbf{A}_{\mathcal{A}}\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}}\mathbf{\mathcal{G}}_{\mathcal{A}}^{-1}1_{\mathcal{A}} = \mathbf{A}_{\mathcal{A}}1_{\mathcal{A}} \ \text{and} \ \ \|\mathbf{u}_{\mathcal{A}}\|^2=1\]
LARS algorithm: LARS의 대략적인 작동 과정은 다음과 같다.
시작은 Forward stagewise selection과 같이 초기 예측값 $\hat{\mu}_0 = 0$으로 초기화 한다. 다음으로, 현재 예측값인 \(\hat{\mu}_{\mathcal{A}}\) 에 대한 잔차를 구하여 모든 피쳐벡터들과 상관관계를 구한다. 즉, 다음을 계산한다.
\[\hat{\mathbf{c}} = \mathbf{X}^T(\mathbf{y}-\hat{\mathbf{\mu}}_{\mathcal{A}})\]구한 상관관계를 바탕으로 active set $\mathcal{A}$와 $\mathbf{X}_{\mathcal{A}}$를 구하기 위한 sign 함수를 다음과 같이 구한다.
\[\begin{align*} \mathcal{A} &= \{j: | \mathbf{c}_j | = \hat{C} \} \ \text{where} \ \hat{C} = max_j | \mathbf{c}_j | \\ s_j &= sign(\hat{\mathbf{c}}_j) \ \text{for} \ j \in \mathcal{A} \end{align*}\]$\hat{\gamma}$를 구하기 위해 모든 피쳐들에 대해 다음과 같은 내적을 계산하여 업데이트를 진행한다.
\[\begin{align*} \mathbf{a} &= \mathbf{X}^T\mathbf{u}_{\mathcal{A}} \\ \hat{\gamma} &= min^+ \{ \frac{\hat{C} - \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} - a_j}, \frac{\hat{C} + \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} + a_j} \} \\ \beta_{\mathcal{A}_j} &\leftarrow \beta_{\mathcal{A}_j} + \hat{\gamma}w_{\mathcal{A}_j} \\ \hat{\mu}_{\mathcal{A}} &\leftarrow \hat{\mu}_{\mathcal{A}} + \hat{\gamma}\mathbf{u}_{\mathcal{A}} \ (\mathbf{r} \leftarrow \mathbf{r} - \hat{\gamma}\mathbf{u}_{\mathcal{A}}) \end{align*}\]
Equiangular vector 유도 과정
위 식에서 $\mathbf{u}_{\mathcal{A}}$가 어떻게 유도되었는지는 다음과 같다.
먼저 $\mathbf{X}_{\mathcal{A}}$내의 모든 열벡터들과 같은 각을 이루므로 내적값이 모두 같아야 한다. 식으로 나타내면 다음과 같다.
\[\mathbf{X}_{\mathcal{A}}^T\mathbf{u}_{\mathcal{A}} = \alpha 1_{\mathcal{A}}, \ \alpha \ \text{is constant} \ \text{and} \ \| \mathbf{u}_{\mathcal{A}} \|^2 = 1\]계산상의 편의를 위해 $\alpha$를 1일 때 위를 만족하는 벡터 $v_{\mathcal{A}}$를 찾아 이에 대한 단위벡터를 구해$\mathbf{u}_{\mathcal{A}}$를 유도해보자. 이는 항등행렬을 이용하여 풀 수 있다.
\[\begin{align*} \mathbf{I}_{\mathcal{A}} 1_{\mathcal{A}} &= 1_{\mathcal{A}} \ (\mathbf{I}_{\mathcal{A}} \in \mathbb{R}^{|\mathcal{A}| \times |\mathcal{A}|} \ \text{is identity matrix}) \\ \mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}} &= 1_{\mathcal{A}} \\ \mathbf{X}_{\mathcal{A}}^T(\mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}}) &= 1_{\mathcal{A}} \\ \mathbf{X}_{\mathcal{A}}^Tv_{\mathcal{A}} &= 1_{\mathcal{A}} \end{align*}\]따라서 $v_{\mathcal{A}}$의 단위벡터를 구하면 된다.
\[\begin{align*} \mathbf{u}_{\mathcal{A}} &= \frac{v_{\mathcal{A}}}{\|v_{\mathcal{A}}\|} \\ &= \frac{1}{\| \mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}}\|} \mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}} \end{align*}\]또한 \(\| \mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}} \|\) 은 다음과 같이 구할 수 있다.
\[\begin{align*} (\| \mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}} \|^2)^{\frac{1}{2}} &= (\left\langle\mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}}, \mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}} \right\rangle)^{\frac{1}{2}} \\ &= ((\mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}})^T\mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}})^{\frac{1}{2}} \\ &= (1_{\mathcal{A}}^T (\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1} 1_{\mathcal{A}})^{\frac{1}{2}} \end{align*}\]따라서 $\mathbf{u}_{\mathcal{A}}$는 다음과 같다.
\[\begin{align*} \mathbf{u}_{\mathcal{A}} &= (1_{\mathcal{A}}^T (\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1} 1_{\mathcal{A}})^{-\frac{1}{2}}\mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}1_{\mathcal{A}} \\ &= \mathbf{A}_{\mathcal{A}}\mathbf{X}_{\mathcal{A}}\mathbf{\mathcal{G}}^{-1}_{\mathcal{A}} 1_{\mathcal{A}} \\ &= \mathbf{X}_{\mathcal{A}}\mathbf{A}_{\mathcal{A}}\mathbf{\mathcal{G}}^{-1}_{\mathcal{A}} 1_{\mathcal{A}} (\because \mathbf{A}_{\mathcal{A}} \in \mathbb{R}) \\ &= \mathbf{X}_{\mathcal{A}}w_{\mathcal{A}} \end{align*}\]
Note. $\mathbf{u}_{\mathcal{A}}$는 즉, 현재 선택된 컬럼들을 이용한 잔차를 현재 열공간에 정사영 시킨 벡터와 같은 방향을 이룬다.
즉, 현재 hat matrix를 $\mathbf{H}_{\mathcal{A}}$라 할 때 \(\mathbf{u}_{\mathcal{A}} = \lambda \mathbf{H}_{\mathcal{A}}(\mathbf{y} - \hat{\mu}_{\mathcal{A}}) = \lambda\mathbf{X}_{\mathcal{A}}(\mathbf{X}_{\mathcal{A}}^T\mathbf{X}_{\mathcal{A}})^{-1}\mathbf{X}_{\mathcal{A}}^T(\mathbf{y} - \hat{\mu}_{\mathcal{A}})\) ($\lambda$는 상수) 이다.
$\hat{\gamma}$ 유도 과정
다시 본론으로 넘어가서 현재 $\hat{\mathbf{\mu}}_{\mathcal{A}}$에서 $\hat{\gamma}$를 찾아보자. 현재 단계에서 벡터마다 상관관계는 \(c_j = \mathbf{x}_j^T(\mathbf{y}-\hat{\mathbf{\mu}}_{\mathcal{A}})\) 이다. 또한 현재 뽑힌 변수들의 인덱스 집합 $\mathcal{A}$은 다음과 같다.
\[\mathcal{A} = \{j: | \mathbf{c}_j | = \hat{C} \} \ \text{where} \ \hat{C} = max_j | \mathbf{c}_j |\]$j \in \mathcal{A}$에 대해 $s_j = sign(\hat{\mathbf{c}}_j)$라 하고, \(\mathbf{a} = \mathbf{X}^T\mathbf{u}_{\mathcal{A}}\) 라 하자(만약 $j \in \mathcal{A}$라면 \(a_j = \mathbf{A}_{\mathcal{A}}\)). 이제 다음 업데이트할 $\hat{\mathbf{\mu}}$와 상관관계를 \(\gamma (\gamma > 0)\)에 대한 함수로 정의해보자.
\[\begin{align*} \mathbf{\mu}(\gamma) &= \hat{\mathbf{\mu}}_{\mathcal{A}} + \gamma \mathbf{u}_{\mathcal{A}}, \\ c_j(\gamma) &= \mathbf{x}_j^T(\mathbf{y} - \mathbf{\mu}(\gamma)) = \hat{c}_j - \gamma a_j \end{align*}\]만약 $j \in \mathcal{A}$라면, \(|\mathbf{c}_j(\gamma )| = | \hat{\mathbf{c}}_j - \gamma a_j | = | \hat{C} - \gamma A_{\mathcal{A}}|\) 이다.
$\mathbf{u}_{\mathcal{A}}$가 현재 잔차를 열공간에 정사영시킨 벡터의 단위벡터이므로 다음이 성립한다.
\[\mathbf{A}_{\mathcal{A}} = \mathbf{x}_j^T \mathbf{u}_{\mathcal{A}}, \ \hat{C} = \mathbf{x}_j^T (\mathbf{y} - \hat{\mathbf{\mu}}_{\mathcal{A}}) = \mathbf{x}_j ^T(\lambda\mathbf{u}_A + \mathbf{v}) \ \text{where} \ \mathbf{x}_j \perp \mathbf{v}\]즉 두벡터는 같은 방향을 가지고 있고, 업데이트 과정에서 현재 active set에 포함되지 않는 다른 컬럼이 존재한다면 $\gamma$는 항상 $\gamma \mathbf{A}_{\mathcal{A}}$가 $\hat{C}$보다 작거나 같도록 업데이트가 진행된다. 만약 같다면 잔차와의 내적값이 0이 된다. 따라서,
\[|c _j(\gamma )| = \hat{C} - \gamma \mathbf{A}_{\mathcal{A}}\]이다.
Note. (OLS와 LARS의 관계) LARS알고리즘이 $k-1$번째 단계까지 업데이트가 진행되었고 현재 $k$번째 단계라고 가정해보자. $\mathbf{y}$를 $\mathbf{X}_k$의 열공간에 사영시킨 벡터를 $\bar{\mathbf{y}}_k$라고 한다면 다음이 성립한다.
\[\begin{align*} \bar{\mathbf{y}}_k &= \hat{\mu}_{k-1} + \mathbf{X}_k(\mathbf{X}_k^T\mathbf{X}_k)^{-1}\mathbf{X}_k^T(\mathbf{y} - \hat{\mu}_{k-1}) \\ &= \hat{\mu}_{k-1} + \mathbf{X}_k(\mathbf{X}_k^T\mathbf{X}_k)^{-1}\hat{C}_k1_k \\ &= \hat{\mu}_{k-1} + \hat{C}_k \mathbf{X}_k\mathcal{G}_k^{-1}1_k = \hat{\mu}_{k-1} + \frac{\hat{C}_k}{\mathbf{A}_k}\mathbf{u}_{k} \end{align*}\]또한 $\bar{\gamma}_k = \frac{\hat{C}_k}{\mathbf{A}_k} $라고 정의하면 다음 관계식이 성립한다.
\[\hat{\mu}_{k} - \hat{\mu}_{k-1} = \frac{\hat{\gamma}_k}{\bar{\gamma}_k}(\bar{\mathbf{y}}_k - \hat{\mu}_{k-1})\]마찬가지로 \(\hat{\gamma}_k\)는 \(\bar{\gamma}_k\)를 넘을 수 없다. 즉, LARS의 추정량인 \(\hat{\mu}_k\)는 이전 스텝의 \(\hat{\mu}_{k-1}\)와 현재 스텝의 OLS 추정량인 \(\bar{\mathbf{y}}_k\)가 이루는 직선 상에 있으며 \(\hat{\mu}_{k-1}\)에 더 가까이 있다. LARS의 추정량은 OLS의 추정량을 넘을 수 없다.
다시 유도과정으로 넘어와서, 새로운 $j \in \mathcal{A}^C$에 대해서도 같은 각을 이루도록 $\gamma$를 잡아야 하므로$\mathbf{c}_j(\gamma )$가 양수면,
\[\begin{align*} \mathbf{c}_j(\gamma ) &= \hat{\mathbf{c}}_j - \gamma a_j = \hat{C} - \gamma \mathbf{A}_{\mathcal{A}} \\ \gamma &= \frac{\hat{C} - \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} - a_j} \end{align*}\]반대로, $\mathbf{c}_j(\gamma )$가 음수면,
\[\begin{align*} -\mathbf{c}_j(\gamma ) &= -\hat{\mathbf{c}}_j + \gamma a_j = \hat{C} - \gamma \mathbf{A}_{\mathcal{A}} \\ \gamma &= \frac{\hat{C} + \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} + a_j} \end{align*}\]이다. 따라서 $\hat{\gamma}$는 위 두 값중 작은 값을 취한다. 즉,
\[\hat{\gamma} = min^+ \{ \frac{\hat{C} - \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} - a_j}, \frac{\hat{C} + \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} + a_j} \}\]이고 다음과 같이 업데이트를 진행한다. ($min+$는 두 값 중 양수 값만 받아 최솟값을 구함.) 즉 잔차와의 상관관계 $\hat{C}_k$ 는 $k$가 증가할때마다 감소함을 알 수 있다.
\[\hat{\mathbf{\mu}}^+ = \hat{\mathbf{\mu}} + \hat{\gamma}\mathbf{u}_{\mathcal{A}}\]마지막 p번째 단계에서, 즉 모든 변수가 $\mathcal{A}_p$에 포함된다면 $j \in \mathcal{A}_p^C$가 없기 때문에 위 $\hat{\gamma}$를 구할 수 없다. 이 때에는 $\hat{\mu}_p$를 $\mathbf{y}$를 현재 $\mathbf{X}$의 열공간에 정사영 시킨 벡터 $\bar{\mathcal{y}}_p$가 되도록 업데이트를 진행한다. 즉, \(\hat{C}_p = \hat{\gamma}_p \mathbf{A}_{\mathcal{A}_p}\) 이 되어야 하므로 \(\hat{\gamma}_p = \frac{\hat{C}_p}{\mathbf{A}_{\mathcal{A}_p}}\) 가 된다.
Summary
LARS의 작동과정을 간단히 나타내면 다음과 같다.
-
잔차 $\mathbf{r}$ 을 $\mathbf{y}$로 ($\hat{\mu}_0 = 0$), $\beta_1 = … = \beta_p = 0$으로 초기화하고 $\mathbf{X}$를 표준화한다.
-
$\mathbf{r}$와 상관관계가 가장 높은 변수 $\mathbf{x}_j$를 선택한다.
-
현재 단계에서 \(\mathcal{A}, \mathbf{X}_{\mathcal{A}}, \mathbf{\mathcal{G}}_{\mathcal{A}}, \mathbf{A}_{\mathcal{A}}\)를 계산한다.
-
$\mathcal{A}$에 모든 벡터가 포함되지 않았다면, \(\mathbf{u}_{\mathcal{A}}, \ \hat{\gamma} = min^+ \{ \frac{\hat{C} - \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} - a_j}, \frac{\hat{C} + \hat{\mathbf{c}}_j}{\mathbf{A}_{\mathcal{A}} + a_j} \}\) 를 계산하여 \(\beta_{\mathcal{A}_j} \leftarrow \beta_{\mathcal{A}_j} + \hat{\gamma} w_{\mathcal{A}_j} , \ \hat{\mu} \leftarrow \hat{\mu} + \hat{\gamma} \mathbf{u}_{\mathcal{A}}\)로 업데이트를 진행한다. 만약 $N-1$번 이상으로 진행되면 업데이트가 이뤄지지 않으므로 종료한다.
-
$p$ 번째 iteration, 즉 $\mathcal{A}$에 모든 변수가 포함되었다면, \(\hat{\gamma}_p = \frac{\hat{C}_p}{\mathbf{A}_{\mathcal{A}_p}}\)를 계산하여, \(\beta_p \leftarrow \beta_p + \hat{\gamma} w_{\mathcal{A}_j} , \ \hat{\mu} \leftarrow \hat{\mu} + \hat{\gamma} \mathbf{u}_{\mathcal{A}}\)로 업데이트를 진행하여 종료한다.
다음 포스팅에서는 Forward stagewise selection, LARS, LASSO의 유사한 점을 비교해볼 것이다.
